Arduino船型机器人 从零到一的设计与制作全攻略
船型机器人,又称水上机器人或智能船,是一种集成了Arduino控制、传感器技术和机械结构的水上移动平台。它不仅是一个有趣的科技项目,更是学习机器人学、编程和电子工程的绝佳载体。本文将详细介绍如何利用Arduino为核心,从设计到制作,打造一艘属于自己的智能船型机器人。
一、 设计构思与材料准备
在动手之前,明确设计目标至关重要。是追求速度、稳定性,还是具备自动避障、循迹等功能?
1. 核心设计思路:
- 船体:提供浮力和稳定性。可以选择现成的模型船壳,或用轻质、防水的材料(如泡沫板、3D打印件)自制。
- 动力系统:通常采用两个直流减速电机分别驱动左右螺旋桨,通过差速实现转向(类似坦克)。
- 控制核心:Arduino Uno或Nano板是理想选择,负责处理指令和控制电机。
- 电源:推荐使用7.4V或11.1V的锂电池组,需搭配相应的电压稳压模块为Arduino和传感器供电。
- 扩展功能:根据需要,可以集成超声波传感器(避障)、红外传感器(循迹)、蓝牙/Wi-Fi模块(无线遥控)、GPS模块(自主导航)等。
2. 主要材料清单:
- Arduino开发板(如Uno)一块
- 电机驱动模块(如L298N或TB6612FNG)一个
- 直流减速电机(带螺旋桨)两个
- 锂离子电池组及充电器一套
- 船体材料(泡沫板/塑料船壳)
- 连接线、开关、防水胶(如硅橡胶)、固定扎带若干
- (可选)超声波传感器、蓝牙模块等
二、 图文制作步骤详解
步骤1:船体制作与动力安装
- 如果使用泡沫板,可切割成如图所示的平底或V型底船体形状,以减小航行阻力。
- 在船尾对称位置开孔,将两个电机轴伸出,并确保螺旋桨完全浸入水中。使用防水胶对电机与船体的接缝处进行严格密封。
- 将电池、Arduino板和驱动板固定在船体内部重心位置,以保持平衡。
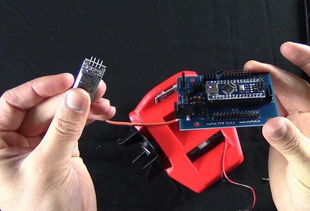
步骤2:电路连接
- 电机连接:将两个电机的线分别接入电机驱动模块的输出端。
- 驱动模块与Arduino连接:驱动模块的输入引脚(如IN1, IN2, IN3, IN4)连接至Arduino的数字引脚(如5,6,9,10),用于控制电机的正反转和速度(PWM)。驱动模块的电源接电池正负极。
- Arduino供电:将电池正极通过一个开关,再连接到驱动模块的5V输出端或一个独立的5V稳压模块,为Arduino供电。
- (可选)传感器连接:例如,将超声波传感器的Trig和Echo引脚接到Arduino的指定数字引脚。
步骤3:基础程序编写与测试
上传一个简单的测试程序,控制船只前进、后退和转向。`cpp
// 定义电机控制引脚
int motorLeft1 = 5; // 左电机引脚1
int motorLeft2 = 6; // 左电机引脚2
int motorRight1 = 9; // 右电机引脚1
int motorRight2 = 10;// 右电机引脚2
void setup() {
// 初始化所有电机控制引脚为输出模式
pinMode(motorLeft1, OUTPUT);
pinMode(motorLeft2, OUTPUT);
pinMode(motorRight1, OUTPUT);
pinMode(motorRight2, OUTPUT);
}
void loop() {
// 示例:前进2秒
moveForward();
delay(2000);
// 右转1秒
turnRight();
delay(1000);
// 停止1秒
stopMotors();
delay(1000);
}
// 自定义运动函数
void moveForward() {
// 左电机正转
analogWrite(motorLeft1, 150); // PWM速度值
digitalWrite(motorLeft2, LOW);
// 右电机正转
analogWrite(motorRight1, 150);
digitalWrite(motorRight2, LOW);
}
void turnRight() {
// 左电机正转,右电机停转或反转,实现右转
analogWrite(motorLeft1, 150);
digitalWrite(motorLeft2, LOW);
digitalWrite(motorRight1, LOW);
digitalWrite(motorRight2, LOW);
}
void stopMotors() {
// 所有电机引脚置低
digitalWrite(motorLeft1, LOW);
digitalWrite(motorLeft2, LOW);
digitalWrite(motorRight1, LOW);
digitalWrite(motorRight2, LOW);
}`
在安全的水域(如浴缸、小水池)进行防水测试和基础运动测试,确保船只按指令行动且无漏水。
步骤4:功能扩展与优化
- 无线遥控:添加蓝牙模块,利用手机APP或电脑发送指令,实现灵活控制。
- 自动避障:集成超声波传感器,编写程序,当检测到前方障碍物时自动转向。
- 稳定性提升:可以考虑增加陀螺仪/加速度计模块,编写自平衡算法。
- 外观与防水:对所有电子设备进行更好的防水处理(如使用防水盒、灌胶),并美化船体外观。
三、 调试与注意事项
- 防水是第一要务:所有电子接口务必做好绝缘和防水,可多次测试确认。
- 重心与平衡:设备安装要确保船体左右、前后平衡,防止侧翻或点头。
- 电源管理:注意电池电压,避免过放。长时间不用时断开电源。
- 代码调试:先从陆上测试开始,逐步进行水上测试,利用串口监视器输出传感器数据辅助调试。
通过以上步骤,一艘由你亲手打造的Arduino船型机器人便初具雏形。这个项目融合了机械、电子和编程知识,在实践过程中你会遇到并解决各种问题,这正是创造的乐趣所在。你还可以为其添加摄像头、机械臂或太阳能板,探索更广阔的水下与水上自动化世界。祝你制作顺利,航行成功!
如若转载,请注明出处:http://www.ctrword.com/product/64.html
更新时间:2026-06-19 14:06:02